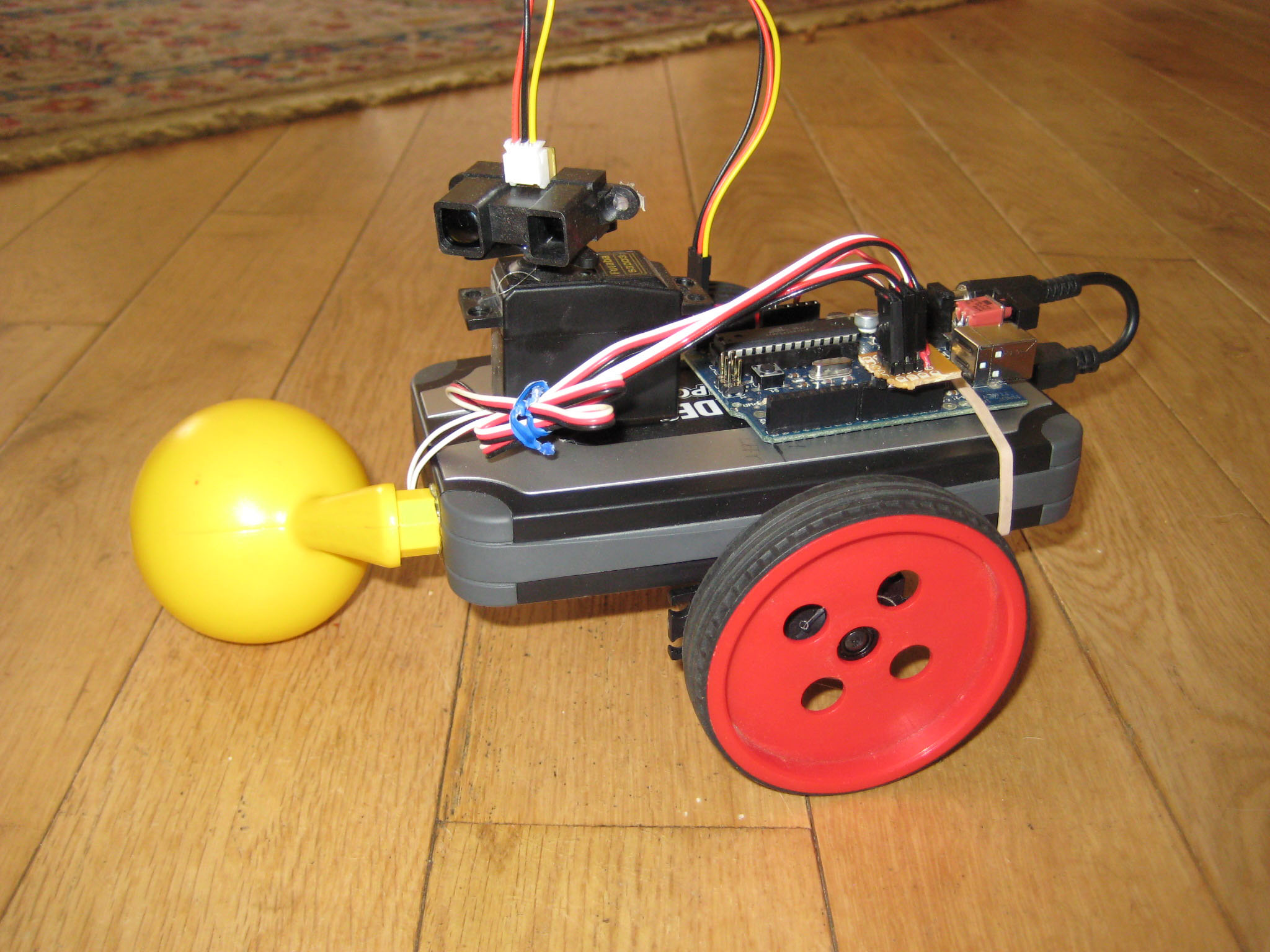
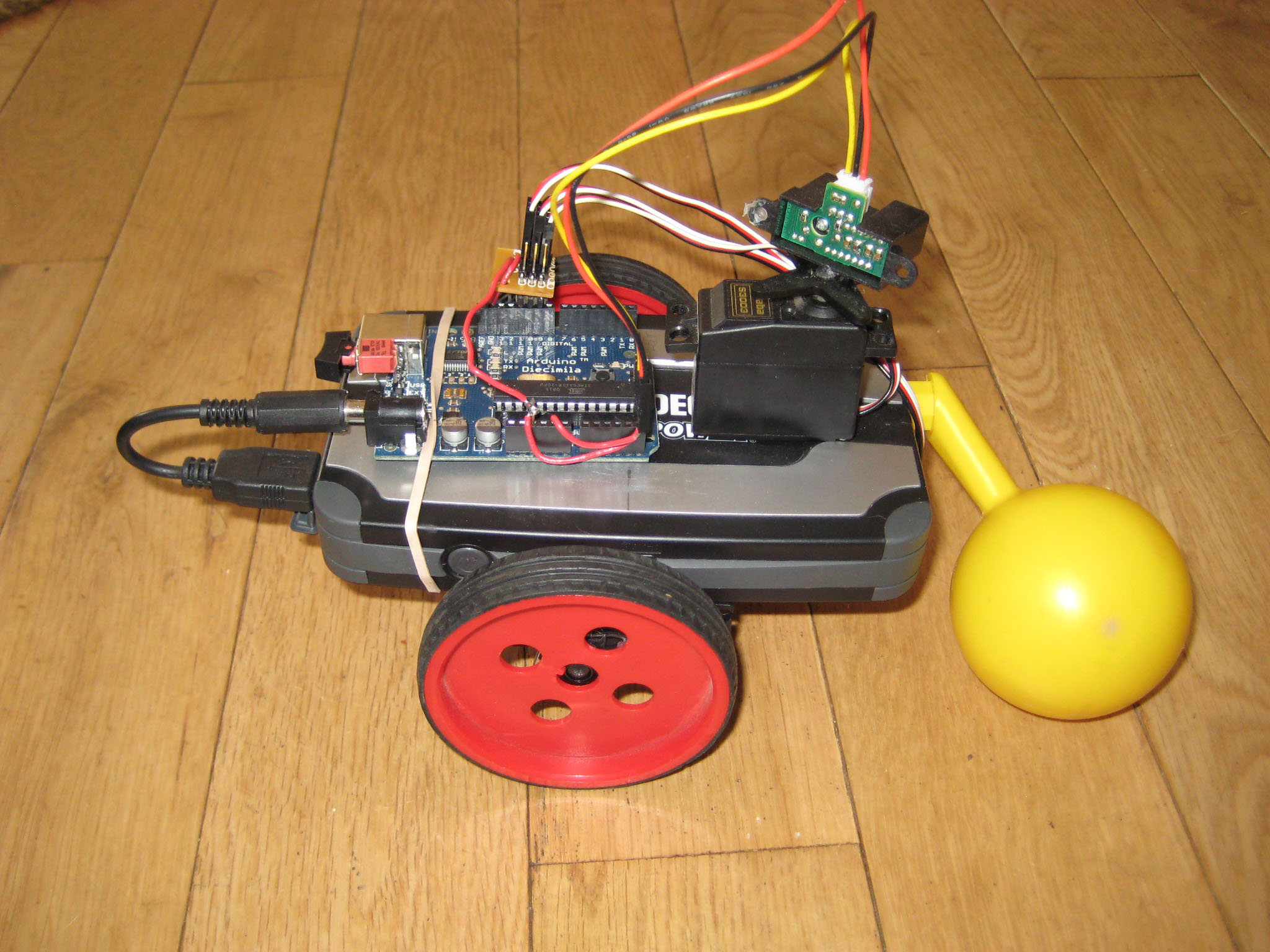
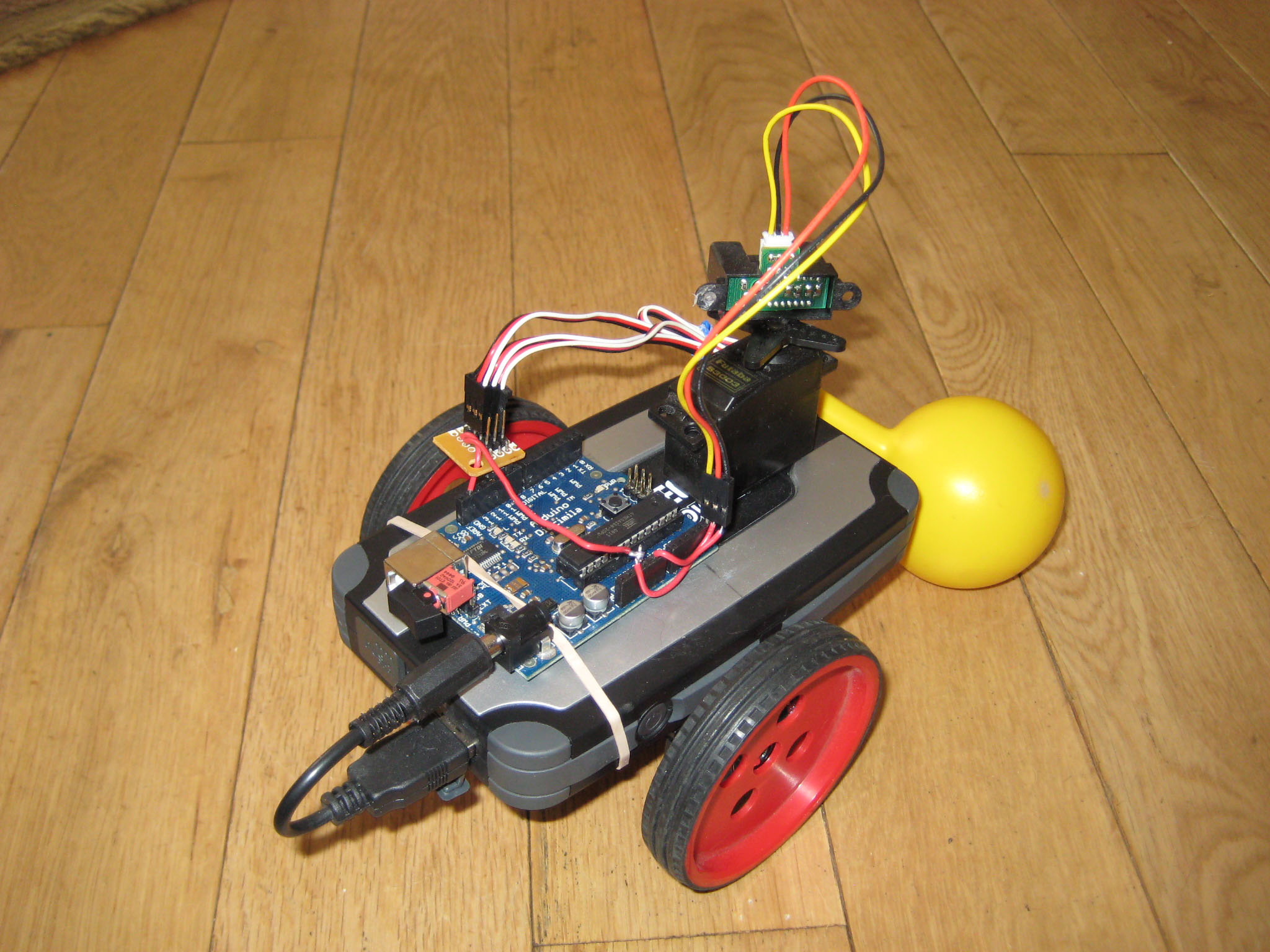
arduino robot
Here's my robot based on the arduino diecimila. It's built from two servos modified for continuous rotation, one standard servo and a sharp ir range finder. The body of the robot is a rechargable battery from black and decker called "pocket power". The wheels and "caster" are parts from capcella. The whole thing is assembled with hot glue.
basic function
The robot sweeps the ir range finder 130 degrees and records the closest object. Objects closer than 10 inches will cause the robot to take action. If this object is more than 45 degrees to the right or left it makes a small correction away from the object. If the object is within the center 90 degrees, it stops, looks left and right, finds the clearest direction and turns about 90 degrees to that direction.
Here's a parts list:
item |
qty | price |
| continuous rotation servo | 2 | 13 |
| standard servo | 1 | 10 |
| sharp ir range finder (#) | 1 | 15 |
| black&decker pocket power | 1 | 7.50 |
| misc parts from capsela | 0 | |
| arduino diecimila | 1 | 38 |
| total | 83.50 |
The code requires the ServoTimer2 library available here:
http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1204020386/74#74
and
http://www.vodkadoctors.at/captFuture/Arduino_balancer/ServoTimer2/
Here is my code for anyone interested:
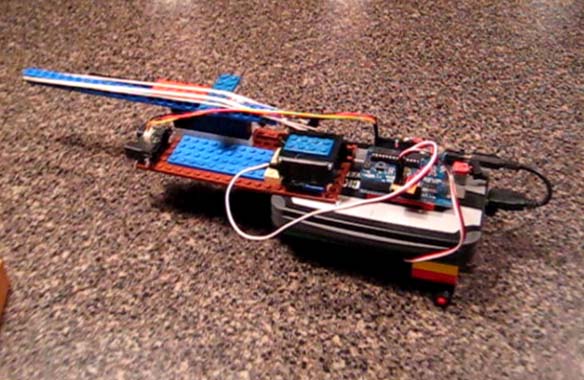
rubberband defender arduino robot
Here's my second robot based on the arduino diecimila. Similar to the previous robot it's built on a black&decker pocket power. This time legos have been glued to the battery to allow me to use legos in the construction. A rather crude rubberband gun is attached to the top. The rubber bands are loaded onto the tines of a servo modified for continuous rotation. Each 1/4 turn makes a rubber band fire. Aiming is done with the sharp ir range finder. the robot fires at everything "in range" which I have set to about 15 inches.
And of course the code for those interested. As before this code requires the ServoTimer2 library (links are listed above.)